突然ですが、北米出張中止になりました!
今回、僕はお手伝いで行くお気楽出張の予定だったのですが、現地での作業内容の変化に伴い、必要人数が減った結果出番がなくなってしまったようです。 残念!!
ということで、みんカラ再開です。
当初予定では今回は欧州式コーナリングのまとめを書くつもりでしたが、その前にいろいろ調べていたら興味深いサーキット走行理論について書いてある海外のWEBサイトがあり、欧州式コーナリングのまとめどころではなくなったので、このWEBサイトの紹介と、このWEBサイトで得られた情報から自分なりに考えたことを書きたいと思います。
まず、日本のWEBサイトでサーキット走行理論に関する検索をしてもどれも似たような内容でどれひとつとして役に立つ記述がありません。
しかし、海外のWEBサイトであれば有益な情報が得られるに違いないと思い、英語の勉強も兼ねて調査することにしました。
僕が知りたいことは、理論上最適な走行ラインがあったとして、なぜその走行ラインは最適と言えるのか?、なぜその走行ラインを走行するとラップタイムが良くなるのか?ということなのですが、なかなか見つけることができません。
走行ラインの最適化に関する論文みたいなものは何個か見つかるのですが、どれもある条件に合った組み合わせの走行ラインをひたすらラップタイムシミュレーションで計算して最もタイムの良い走行ラインを見つけるという方法を採用しているので、なぜその走行ラインで走るとタイムが良いのか?がわかりません。
YouTubeも見てみましたが言ってることは日本のWEBサイトの内容と大して変わりがなく欲しい情報が得られませんでした。
検索ワードが悪いのかなぁと思い、いろいろ検索ワードを変えて調べたところ、「Trail Braking」の検索結果で参考になりそうなWEBサイトを見つけました。
それが、今回紹介するThe Perfect Corner (ザ パーフェクト コーナ)です。
The Perfect Cornerというのは、このWEBサイトを運営しているPARADIGMSHIFT DRIVER DEVELOPMENTという会社が発行している本の名前で、WEBサイトとYouTubeで本の内容が紹介されています。
WEBサイトとYouTubeを見た後に本(kindle版)も買って読んでみましたが、重要なことはWEBサイトとYouTube見るとおおよそわかります。
WEBサイト
RACING BASICSのページ
このRACING BASICSのページの中で特に参考になったページ
1、The Racing Line
2、Trail Braking
3、Trail Brakingその2
YouTube
特に1番目のThe Racing Lineを読んで欲しいです。
というか読まなくてもいいので、このThe Racing Lineの中間くらいにコーナリング中の車輛に働く力の方向の矢印が書いてある絵を見てください。
今までこういう観点で走行ラインを考えたことがなかったのですが、言われてみればこの考え方が正しいはずです。
この考え方とは
1、コーナ入口と出口の進行方向の速度変化をベクトルで表す。

2、
1の速度ベクトル変化を最短時間で行うとき、コーナを最も速く走ることができる。
3、速度ベクトル変化を最短時間にするためには、車輛に働く力(=タイヤ摩擦力)を可能な限り速度ベクトル変化と同じ方向としてタイヤの摩擦円の縁で走行すればよい。
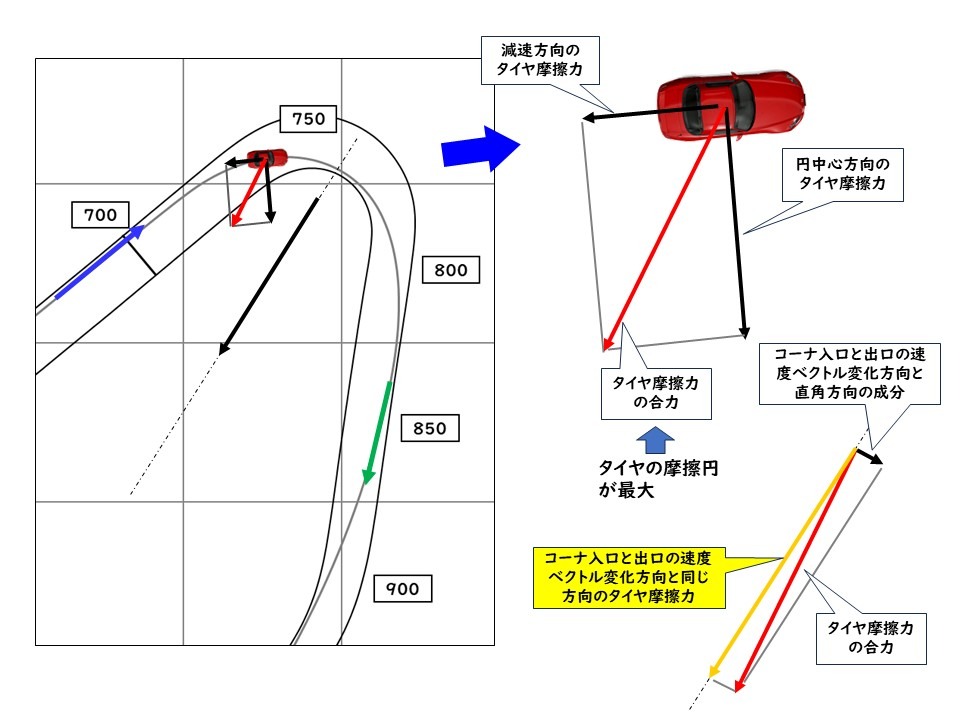
つまり、上図のオレンジ色の矢印(入口と出口の速度ベクトル変化と同じ方向のタイヤ摩擦力)が可能な限り大きい状態でコーナを走ったとき、最もコーナを速く走れるという考え方です。
この考え方が正しいとするならば、今まで行ったサーキットシミュレーション結果の前後加速度と横加速度の合力から速度ベクトル変化方向の成分を算出し、さらにその時間平均の値を比較すれば、時間平均の値が大きいほどコーナ区間タイムが速いということになっているはずです。
そこで、まずはハンガロリンクのシビックの最適化した走行ラインで確認してみました。
このグラフのオレンジ色の線が入口と出口の速度ベクトル変化と同じ方向のタイヤ摩擦力の大きさ(=車輛加速度)を示しています。

このシミュレーションでは最大減速Gを0.95G(9.3m/sec2)、最大横Gを1.05G(10.3m/sec2)としているのですが、減速開始から最低速度になるまでほぼ減少することなく、減速および横Gの最大値に近い状態を保って減速できていることが確認できました。
(最大減速Gが9.3m/sec2であるのに対し、シミュレーションの速度変化方向加速度が9.1m/sec2となっている理由は、このコーナが完全なUターンではなく、ややV字となっており、コーナ入口と速度変化方向に角度がついているためです。)
ということで、たぶん間違いないと思うのですが、これまでも何度も間違えて訂正しているので、ゴールデンウイークの休み中にしっかり確認したいと思います。
ブログ一覧 |
サーキット走行理論 | 日記
Posted at
2024/04/26 00:19:13











